Kia Picanto (JA): Kupplungsystem / Kupplungsausrückgabel und Kupplungsausrücklager
Bauteile und bauteile-Übersicht
| BAUTEILE-ÜBERSICHT |
[Kappa 1,0 MPI / FFV, Kappa 1,2 MPI]
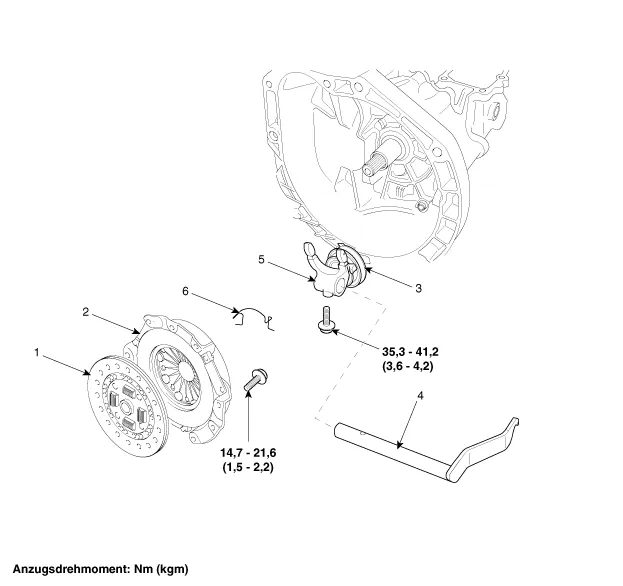
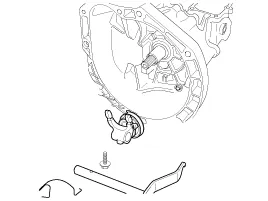
| 1. Kupplungsscheibe 2. Kupplungsdeckel 3. Ausrücklager 4. Kupplungs-Ausrückhebel |
5. Rückstellfeder 6. Ausrückgabel 7. Rückstellclip |
[Kappa 1,0 T-GDI]
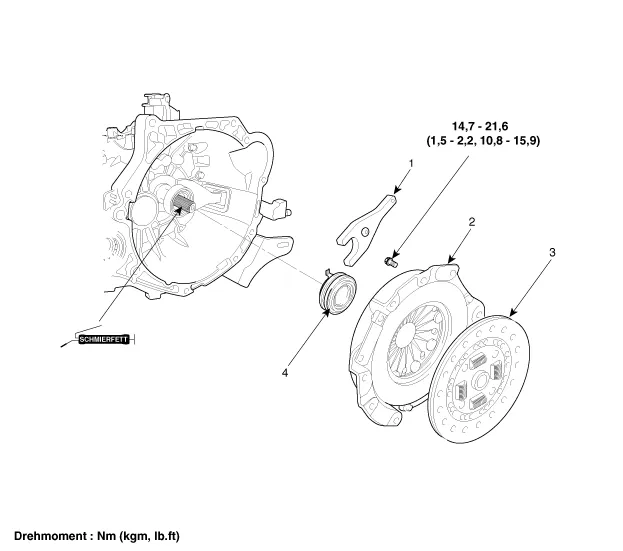
| 1. Ausrückgabel 2. Kupplungsdeckel |
3. Kupplungsscheibe 4. Ausrücklager |
Reparaturverfahren
| Ausbau |
[Kappa 1,0 MPI / FFV, Kappa 1,2 MPI]
| 1. |
Getriebe ausbauen. G 1,0 MPI KAPPA (Siehe Schaltgetriebe - " Schaltgetriebe") G 1,2 MPI KAPPA (Siehe Schaltgetriebe - " Schaltgetriebe") F 1,0 KAPPA FFV (Siehe Schaltgetriebe - " Schaltgetriebe") |
| 2. |
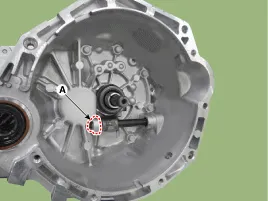
Führungsschraube lösen.
|
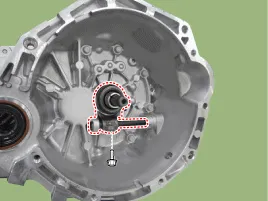
| 3. |
Rückstellclip (A) vom Ausrücklager abnehmen und die Ausrückgabel sowie das Ausrücklager entfernen.
|

[Kappa 1,0 T-GDI]
| 1. |
Getriebe ausbauen. G 1,0 T-GDI KAPPA (Siehe Schaltgetriebe - " Schaltgetriebe") |
| 2. |
Kupplungsausrücklager (A) ausbauen.
|
| 3. |
Clip (A) ziehen.
|
| 4. |
Kupplungs-Ausrückgabel (A) ausbauen.
|
| 5. |
Manschette (A) entfernen.
|
| Einbau |
[Kappa 1,0 MPI / FFV, Kappa 1,2 MPI]
| 1. |
Mehrzweckfett auf die Ausrückgabel auftragen
|

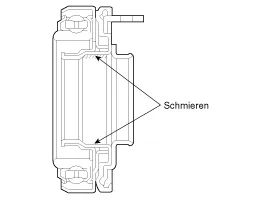
| 2. |
Mehrzweckschmierfett in die Rille des Ausrücklagers auftragen.
|
| 3. |
Ausrücklager und Ausrückgabel in die Kupplungsglocke einbauen.
|
| 4. |
Führungsschraube festziehen.
|
| 5. |
Mehrzweckfett auf die Hebelkontaktfläche auftragen (A).
|
| 6. |
Oberflächen der Schwungscheibe und der Druckplatte gründlich mit feinem Schleifpapier reinigen und darauf achten, dass die beiden Bauteile vollständig fettfrei sind. |
| 7. |
Eine kleine Menge Mehrzweckfett auf die Keilnuten (A) der Eingangswellen auftragen.
|

| 8. |
Die Oberflächen des Schwungrads und der Druckplatte mit feinem Sandpapier oder rauhem Tuch gründlich reinigen und sicherstellen, dass l oder Fett vollständig entfernt wurden. |
| 9. |
Getriebe einbauen. G 1,0 MPI KAPPA (Siehe Schaltgetriebe - " Schaltgetriebe") G 1,2 MPI KAPPA (Siehe Schaltgetriebe - " Schaltgetriebe") F 1,0 KAPPA FFV (Siehe Schaltgetriebe - " Schaltgetriebe") |
[Kappa 1,0 T-GDI]
| 1. |
Manschette (A) einbauen.
|
| 2. |
Clip an der Kupplungs-Ausrückgabel anbringen. |
| 3. |
Schmierfett an Position A, B und C auftragen.
|
| 4. |
Fett rund um die Lochfläche des Kupplungsausrücklagers auftragen.
|
| 5. |
Kupplungsausrückgabel (B), Kupplungsausrücklager (A).
|
| 6. |
Getriebe einbauen. G 1,0 T-GDI KAPPA (Siehe Schaltgetriebe - " Schaltgetriebe") |
Reparaturverfahren Ausbau [Kappa 1,0 T-GDI] 1. Untere Motorraumabdeckung abbauen. G 1,0 T-GDI KAPPA (Siehe Motormechanik - "Untere Motorraumabdeckung") 2.
Technische daten Technische Daten Getriebemodell M5CF1-1 Motortyp Benzin 1,0 T-GDI Schaltgetriebeöl Kapazität 1,6 ~ 1,7 L (0,42 -0,45 U.
Weitere Informationen:
Kia Picanto (JA) Reparaturanleitung: Notruf (eCall)-Taste
Bauteile und bauteile-Übersicht BAUTEILE-ÜBERSICHT Reparaturverfahren Ausbau 1. Batteriemassekabel abklemmen. 2. Mit einem Schraubendreher oder Abzieher das Glas (A) der Kartenleseleuchte lösen.
Kia Picanto (JA) Reparaturanleitung: Heizung, Lüftung und Klimaanlage
Technische daten SPEZIFIKATION Klimaanlage Pos. SPEZIFIKATION Kompressor Typ 5VSe09 (Variable Taumelscheibe) 5VS09 Öltyp & Fassungsvermögen FD46XG (PAG) 100 ± 10 g Riemenscheibe, Bauart KEI
Kategorien
- Handbücher Startseite
- Kia Picanto Bedienungsanleitung
- Kia Picanto Werkstatthandbuch
- Allgemeine Informationen
- Türschlösser von innen bedienen
- Automatikgetriebe
- Neu auf der Seite
- Wichtigste Infos zum Auto
